実験自動化に大事なこと
今回お話を伺った芝井さんは、実験進化や実験自動化を研究している研究室の方。同じ研究室の内田さんには以前メダカのお話を伺いましたが、今回は打って変わってエンジニアリング気質の方らしい…。このシリーズの編集担当さんが、所内の研究発表会で聞いた話がおもしろかったと言うので、どんな方なのかネホリハホリしてきました。
芝井 厚(しばい・あつし)さん
理化学研究所 生命機能科学研究センター 多階層生命動態研究チーム 基礎科学特別研究員
奈良工業高等専門学校でロボット工学を学んだ後、大阪大学大学院へ進学し博士号を取得。装置を作る、制御プログラムを書くことを得意としているが、究極的にはタンクに必要なものを入れれば所望の細胞や臓器ができるSFに出てきそうな装置を作ることを夢見て研究に邁進している。
奈良高専卒です!
いきなりですが、どんな研究をしているんですか?
今所属している古澤研での研究は、大きく分けて細菌を研究室の中で進化させる実験と、その実験の自動化という二つの方向性があります。僕はどちらかというと自動化に特化した研究をしているんです。
じゃあバックグラウンドは生物ではなく、自動化?
実は、ロボットの勉強を奈良高専でずっとやってたんです。
高専は5年間ですが、その後専攻科に進んでさらに2年いたので、実質大学4年の年齢まで高専にいて、修士からは細菌の研究をやって、博士号を取得してから理研に来ました。そういう経緯もあって、今は細菌の実験進化のロボットによる自動化をメインの仕事としてやっています。
高専っていうと「ロボコン」ですよね!
残念ながら、僕自身はロボコンの人ではないのですが、同級生にはロボコンプロジェクト(からくり部)の人がいたので、いろいろ見て学んでましたね。彼らがめちゃくちゃ熱心だったので、僕の下級生くらいから奈良高専のロボコンは強くなりました。
高専ってどんなところなんですか?
高専は雰囲気は自由ですし、大学受験がない分勉強しろと言われるわけではないので厳しいわけではないんですけど、授業の内容はものすごく専門的なことに特化しているし、それを教える教員もだいたい博士号を持っています。なので、いろんなことが普通の高校とは違うんじゃないかと思います。まあ高校行ってないから知らないですけど。そういう意味で、15歳で選んだ専門が実は合ってなくてついていけなくなる学生も少なくないです。
細菌の実験進化とは?
細菌の実験進化というのは、どういう実験なんですか?
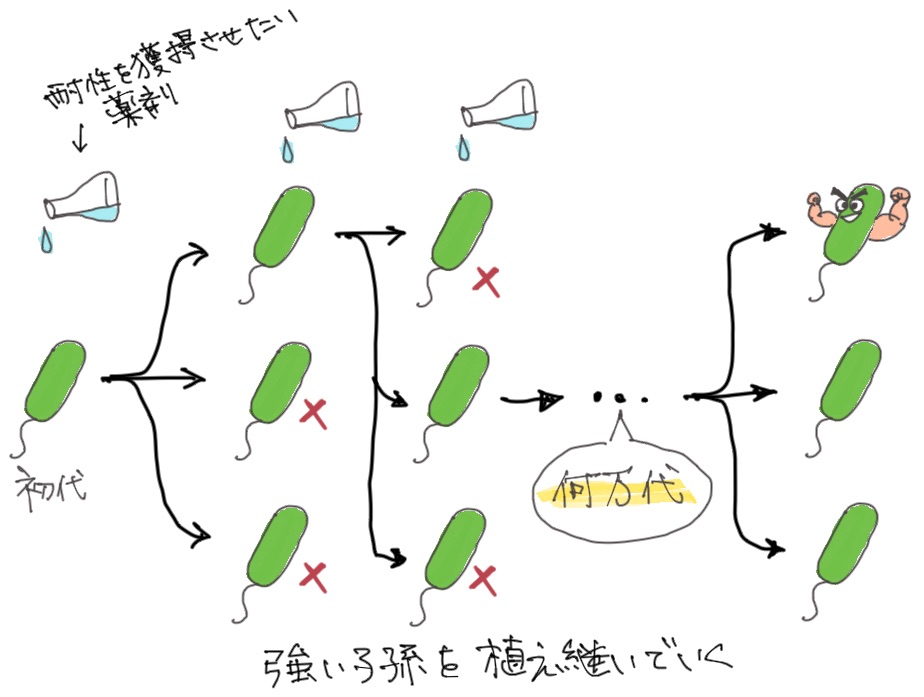
「薬剤耐性菌」って聞いたことありますか?「薬剤耐性」というのは、細菌は普通は抗生物質で死んでしまうんですが、抗生物質が効かないほうに細菌が強くなっていくことです。ヒトから見ると抗生物質でやっつけられないので非常に厄介な存在ですが、実験的にはどうやって環境に適応して生き残れるような進化が起きたのかを知る上で重要です。
だから、実験では細菌に抗生物質を投与しながら培養し続けて薬剤耐性進化を観察します。一般的な実験進化では細菌を1種類の薬剤にさらすことで、細菌はその薬剤に対してできるだけ高い耐性を持つよう進化します。僕の実験は少し特殊で、この薬剤にはこのくらい強くしたい、こっちの薬剤にはこれくらい、とあらかじめ目標となる耐性の強さを複数の薬剤に対して決めておいて、複数種類の薬剤を同時に細菌に投与して細菌の進化を狙った方向に制御することができないかを試しています。
最近ではスーパー薬剤耐性菌というありとあらゆる抗生物質が効かない細菌も出てきているんですが、そういうものへの進化がどうやって起こるのかがわかれば、薬剤耐性を持ちにくい抗生物質の使い方みたいなものがわかるかもしれません。
どうやって進化を制御するんですか?
抗生物質をかけるとほとんどの細菌はもちろん死んでしまいますが、たまたまその薬剤にちょっと強い細菌が生き残るので、それを選抜して、また薬剤をかけて、生き残ったのを選抜して、ということを繰り返すと、その薬剤に強い細菌に進化していきます。
抗生物質はその効き方によって、こっちの薬剤に耐性がつくと、あっちの薬剤に弱くなる、という薬剤の組み合わせがあるんですが、例えばその2つともに強くしたい、さらにそこにもう1種類加えて、合計3種類の薬剤全てに耐性を持つような細菌に進化させたい、という感じで目標を設定して、3つの抗生物質に対して全て耐性を持つ細菌を人工的に制御して進化させました。
1つの薬剤耐性だけならイメージできるんですが、3つだとそれぞれの濃度のバランスとか、組み合わせが無限にありますよね。
その通りです。その無限の濃度の組み合わせの中から、細菌が効率的に進化できるものを実験的に見出すことが必要になります。イメージでは3種類すべての薬剤に対して同程度に徐々に強くなっていく進化が一番早くて効率がいいように思うんですが、実際にやってみるとまず1つの薬剤耐性を獲得して、その後他の2つの耐性を獲得するような、一見回りくどい進化の道のりが一番効率よく、一番目標とする強さに近づいていくことがわかります。
どのくらいの時間で進化が完成するんですか?
人間がだいたい20年で1世代なのに対して、細菌だとだいたい20分で分裂できるので、1ヶ月で2,000世代くらいになるかな。その間、毎日、毎時間、分裂するので、土曜日も日曜日も関係なく植え継ぎをしないといけないんです。しかも、僕らの実験系だとさっき言った無限にある薬剤濃度の組み合わせの中から複数の条件を選んで進化させているので、常に300系統くらいを維持しています。そうすると同時にやらないといけない作業の量がめちゃくちゃ多くなるんです。さらに、その時に系統ごと日ごとに扱う液量が違うから、ピペットの液量設定を毎回やらないといけない。
あのダイヤルをくるくる回す設定を1回の作業で1,000回くらいやらないといけないってことか!それはもう、手ではやってられないですね…。
やはり自動化ロボはすごい。けど…。
だから自動化が必要になるんです。しかも「前の濃度がこうだったから、次はこの濃度で」みたいな計算も必要なんです。全系統の、全薬剤に対して。
人がやると間違える気がしますね。
実験に使っていた分注ロボットに元々付属しているソフトウェアの中に、スクリプトを書き込めるところがあることに気がついたので、そこに濃度を計算して分注する液量に反映させる長い長いプログラムを書き込みました。そのソフトウェアはもともとはGUI(グラフィカルユーザーインターフェース)なので、本来はマウスでクリックしたり、数字を入力したりすることで作動させるんですがね。ある意味、ハックしたような状態です。理屈の上ではできるのはわかっているがとてもやりたくはないことを、忙しさにまかせて無心でやったらできた、という感じです。一度やってしまえばあとは楽で、今はその設定作業自体もだいぶ省力化できましたし、1,000回ダイヤルを回す作業からも解放されました。
やっぱり自動化やロボってすごいですね。
そうなんですが、正直なところをいうと、バイオロジーでよくある自動化研究って、自動化研究と言えるのか?とも思うんです。バイオロジーだと買ってきたものを繋げて、メーカーの提供してくれたやり方で動かす、というのが多いように思います。もちろんそれも使いこなすまでには大変なんですが、まあせっかく高専出身なので気楽にいろいろ作ったり開発したりする方で僕はやっていきたいと思っています。
工夫すればもっとフレキシブルにできる
大学院の時の研究テーマが細菌と突然変異の関係だったんです。そのために延々と細菌に紫外線を当て続ける作業をやらなくちゃいけなくなりました。細菌に餌をあげる、培地を変える、植え継ぐ、紫外線を当てる、これの繰り返しです。最初の1年は、こういうのも経験かなと思って、ひたすらやってたんですよ。1週間でプレート500枚やる。1日12、3時間、土日もずっと実験。そんな感じの生活でした。
このインタビューシリーズでは、よく聞く壮絶な実験生活…。
とはいえ、やっていることはとっても単純なんです。だから自動化できるな、と思って2年目に入ったら全部自動でやる装置を作りました。必要なのはUVランプと、培養液の濁度を測るための可視光LEDと光量を測る検出器だけ。UVのLEDは1〜2万円くらいしますけど、可視光LEDと検出器は300円くらいで手に入ります。試験管を差すケースは最初は使い終わったスティックのりでした。サイズがぴったりなんですよ。最終的には3Dプリンターで作りましたけど。制御はArduino(オープンソースの電子工作用プラットフォーム)でやりました。

ここで高専卒の知識が生かされたわけですね。
実は高専時代はプログラミングばかりやっていたので実際に自分で装置を作ったことはなかったんですが、それこそロボコンプロジェクトとか友人が何かを作っているのはよく見ていたので、なにをどうしたら作れる、というようなイメージはわきやすかったですね。ちなみに、この装置、市販の分光光度計より濁度の測定精度が良かったんです。自腹でその辺で買ってきた部品を組んで作った装置が、です。
一方で、生物実験に使われる自動化のロボや機械は、1台数千万円することも珍しくないんです。その上、いろいろと課題があります。例えば、振盪培養機はずっと揺らしていないといけないわけです。稼働部が多いとやっぱりそこが消耗して壊れます。しかも自動化する目的は大量のサンプルを扱うことなので、一台で100枚もプレートを揺らせます!みたいな装置ばかりなので、その装置が壊れると一気に100枚分の実験がダメになってしまう。さらに故障を修理する間にできない実験も膨大な数になる。
処理できる数が大きいということは、リスクが分散化されていないから、損害もそのまま大きくなるってことですか。
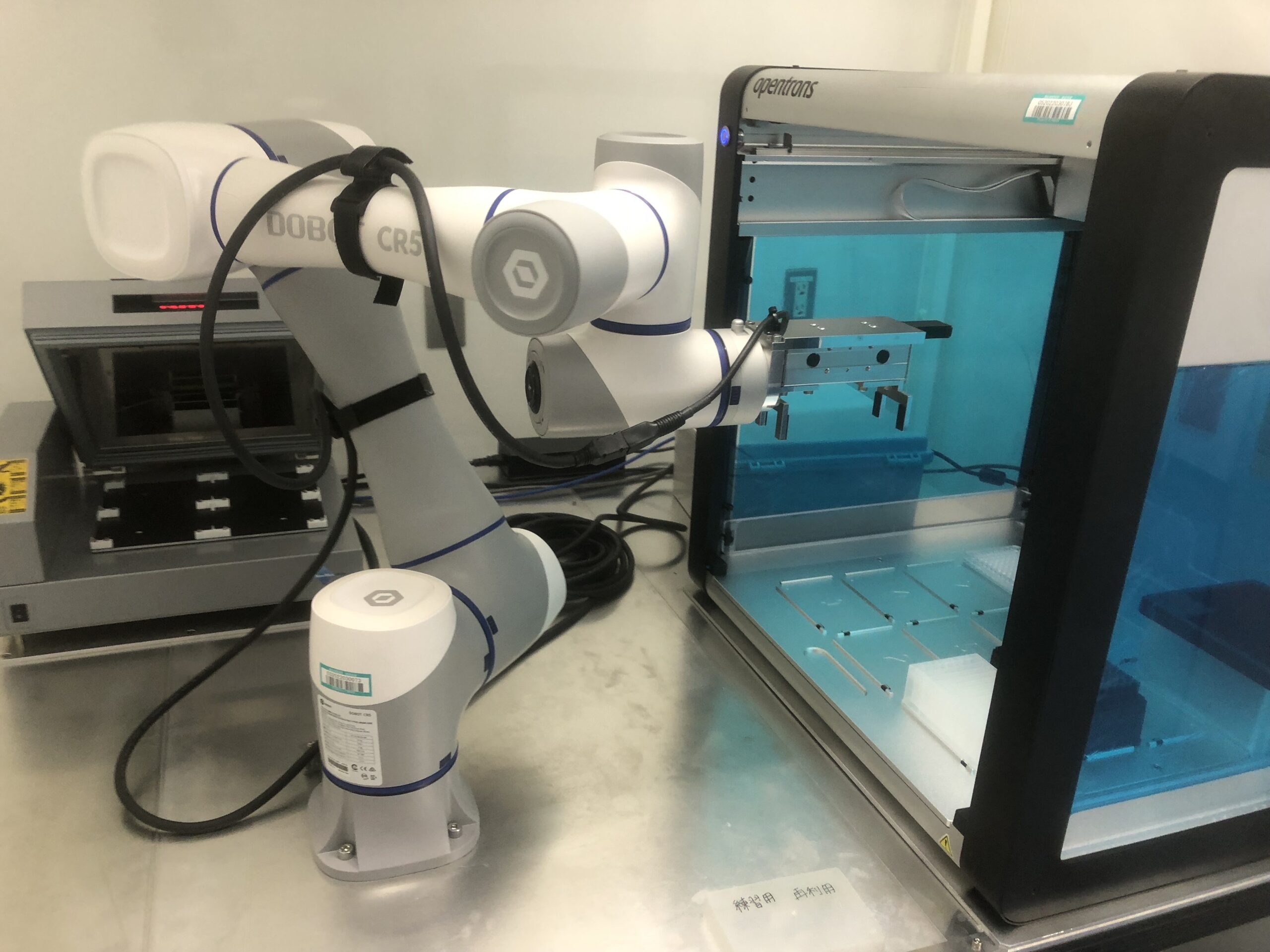
そうなんです。なので、自分で自動化するときは、小さい装置も作ってます。プレート数枚だけを小さなロボでハンドルするくらいの。これなら、むしろ単純すぎて壊れないんですよ。しかも同じものをたくさん並べておけば結局は同じ大容量のサンプルを扱えます。こういった工夫も、自分で考えてやっていくのがおもしろいと思いますね。
すべての選択肢を排除しない
工学系の高専卒でバイオ分野にいるのは、どんなモチベーションで研究をしているんですか?
バイオロジーとロボットを繋ぐことを盛り上げていきたいな、と思っています。とはいえ、人間の性能というのもちゃんと認識していたいと思っています。
どういうことですか?
高専卒なら知っている人もいる有名な出来事があるんです。高専にはプログラミングコンテストというイベントが毎年あるんですけど、10年くらい前の大会で、サイズの違うサイコロがたくさん山積みになっている画像からサイコロの数を数えるというお題が出ました。プログラミングのコンテストなので、当然、画像処理の技術を活用するわけです。
今だとAIとか使うんでしょうね。
当時は、まだそこまでではなかったので、普通の画像処理がベースになるはずでした。ところが、1位と3位になった高専は、なんと人の手でカウントしていたんです。
それってズルじゃないんですか!?
おもしろいことに、この出来事を振り返るレポートがある参加高専の紀要として公開されています(”プログラミングコンテスト2012におけるサイコロ検出問題の解法”,新井,他,明石工業高等専門学校研究紀要 第56号)。それによると1位の高専のチームは「画像処理によるカウントも試したところ、人力の性能を超えられなかった」とコメントしています。そして、このレポートのまとめとして、このレポートを書いたチームは「1つの手法の精度を向上させようとギリギリまでプログラミングをしていて、他の手法を比較する余裕がなかったのが敗因と言える。人力によるカウントがルール上認められている以上、試すべきだった」ことを敗因としてあげています。確かに、ルール上「手でカウントしてはいけない」とは書いていないんです。
これをどう解釈するかで自動化を考える上でのスタンスが変わってくると思うんです。「やってはいけないこと」でなければ、なんでもいろいろチャレンジしてみるべきだし、でもよくよく考えると自動化でないほうがいい場合もやはりあるので、自動化すごい、ロボットすごい、だけではなくて、人間がやるという選択肢も排除せずに柔軟に考えていきたいです。

編集後記
高専のお話やロボコンのお話など、普段のネホリハホリでは聞いてこなかった分野のさまざまなトピックがあり、原稿に書いた3倍くらいの話をお聞きしました。冒頭の所内の研究発表会でみんなが「おもしろかった」と言っているのは、研究内容と並行して話した私生活パートの顛末がウケただけじゃないですかね、とのことですが、それ以外のお話もおもしろかったです。バックグラウンドが違うと、ものの見え方が違うんだなぁと実感しました。